Skip to content
@tomasmcguinness
Bluesky
YouTube
X
Category:
Personal Project
Automatic delay of my SmartThings Samsung Washing Machine
Jul 19, 2026
Energy
,
ESP32
,
Matter
,
Matter Home Energy Manager
,
SmartThings
Building an M-Bus Adapter with onboard ESP32
Jul 8, 2026
Electronics
,
Matter
,
PCB
,
Personal Project
Matter Home Energy Manager – First Milestone!
May 27, 2026
ESP-MATTER
,
ESP32
,
Matter
,
Matter Home Energy Manager
,
Smart Home
Building a Matter Meter Reference Point device for testing
May 14, 2026
Energy
,
ESP-MATTER
,
ESP32
,
Matter
,
Personal Project
,
Smart Home
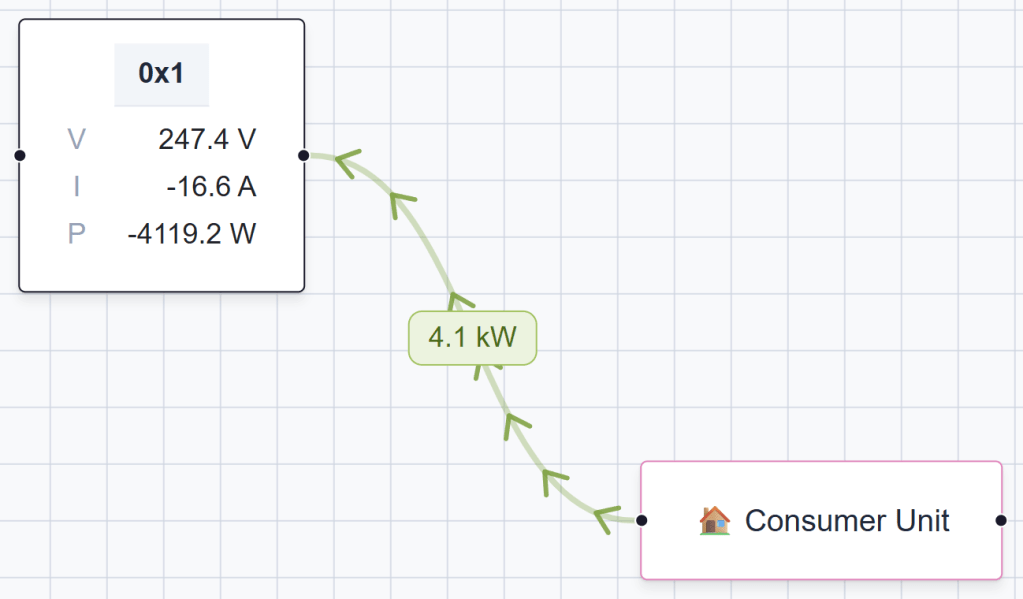
Integrating a Solax X1-G4 Inverter with Matter Protocol
Apr 29, 2026
ESP-MATTER
,
ESP32
,
Matter
,
Personal Project
,
SolarPV
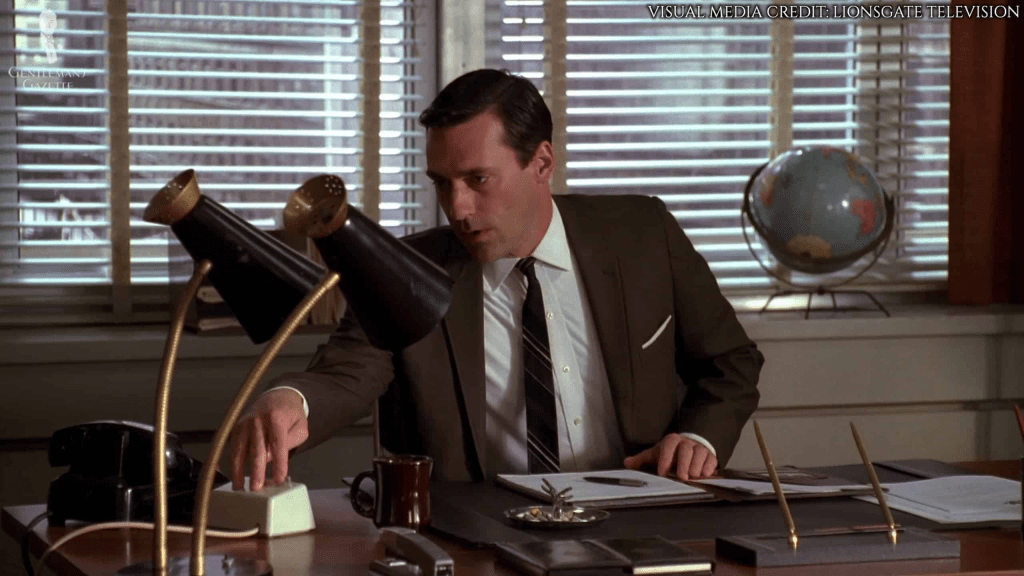
Building a Mad Men inspired intercom – the failed first attempt!
Apr 23, 2026
3D Printing
,
Personal Project
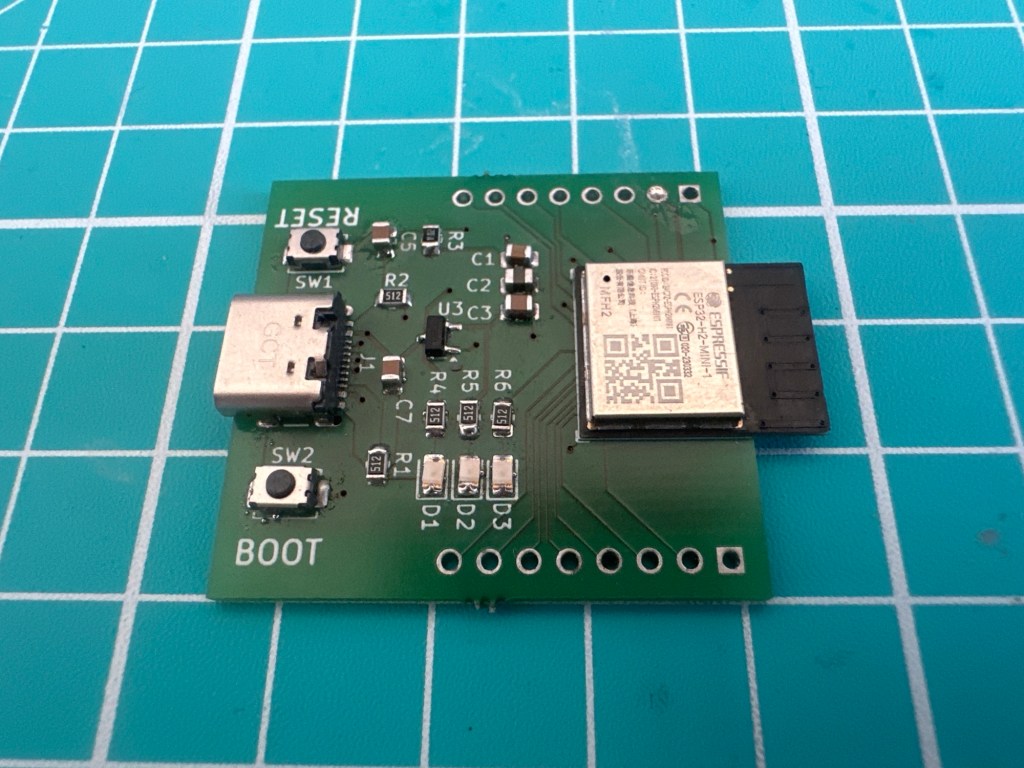
My first attempt at building a custom ESP32-H2 PCB didn’t go to plan!
Apr 20, 2026
ESP32
,
ESP32-H2
,
PCB
,
Personal Project
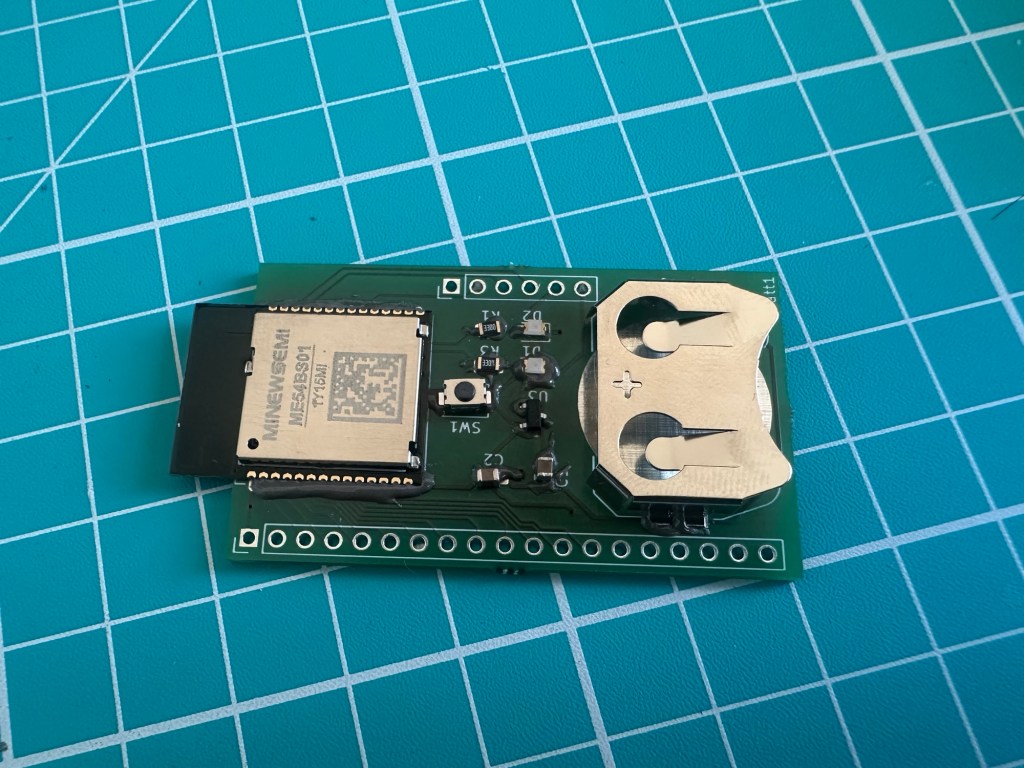
Assembling and flashing my custom nRF54L15 board
Apr 18, 2026
MinewSemi
,
Nordic
,
nRF54L15
,
PCB
,
Personal Project
Exposing a Modbus Energy Meter via Matter using ESP32 & MAX485
Mar 29, 2026
Development
,
ESP-MATTER
,
ESP32
,
Matter
,
Personal Project
Matter Dual Temperature Sensor power consumption finally at 20µA!
Feb 1, 2026
Matter
,
Nordic
,
Personal Project
,
Uncategorized
Dual Temperature Sensor – Adding Power Source Cluster
Jan 15, 2026
Matter
,
Nordic
,
Personal Project
Matter Heating Monitor – Adding Subscriptions
Jan 5, 2026
ESP-MATTER
,
Matter
,
Personal Project
,
Uncategorized
1
2
3
…
7
Next
→
Subscribe
Subscribed
@tomasmcguinness
Join 66 other subscribers
Sign me up
Already have a WordPress.com account?
Log in now.
@tomasmcguinness
Subscribe
Subscribed
Sign up
Log in
Report this content
View site in Reader
Manage subscriptions
Collapse this bar